

Des robots à quatre pattes apprennent à franchir des escaliers et des blocs grâce à des simulations d’obstacles virtuels.
Des milliers de robots se sont entraînés à affronter différents obstacles dans une simulation virtuelle. L’algorithme d’entraînement a ensuite permis de contrôler les jambes d’un véritable robot dans le monde réel. Cela pourrait ouvrir la voie à de nouvelles opportunités pour le développement des robots.
Simuler des obstacles virtuels pour entraîner de véritables robots ?
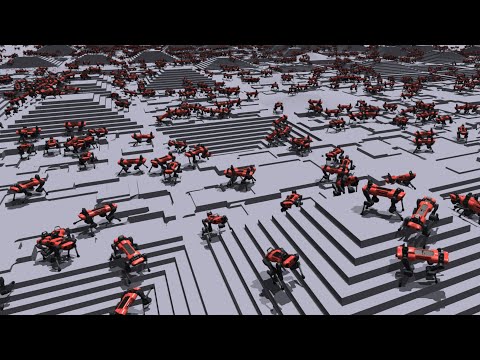
L’École polytechnique fédérale de Zurich en Suisse et NVIDIA ont développé plus de 4 000 robots virtuels quadrupèdes, appelés ANYmals. Dans une simulation, ces robots ont été chargés d’affronter des parcours d’obstacles virtuels. L’environnement d’entraînement comprenait des pentes, des marchés ainsi que des chutes abruptes.
Au cours de la simulation, lorsqu’un robot parvenait à relever un défi, il devait affronter un obstacle plus difficile. De cette manière, l’algorithme de contrôle devient plus sophistiqué. Pour les escaliers, les robots s’en sortaient assez facilement. Mais les obstacles plus complexes leur donnaient plus de difficulté.
L’objectif était d’entraîner un algorithme robotique qui permettra par la suite de contrôler les jambes d’un véritable quadrupède dans le monde réel. La version réelle d’ANYmal fait la taille d’un chien, dispose de capteurs sur la tête et d’un bras robotique détachable.
Une fois transféré dans l’ANYmal, l’algorithme lui a permis de montrer et descendre les escaliers et les blocs. Cependant, il a rencontré des problèmes à des vitesses plus élevées. Selon les chercheurs, les capteurs ont plus de mal au niveau de la perception dans le monde réel.
Une simulation et un apprentissage par renforcement
Pour entraîner l’algorithme, les chercheurs ont procédé à l’aide d’un système d’apprentissage par renforcement. Entre autres, quand les robots bougent leurs jambes, un algorithme juge l’impact de ce mouvement pour ajuster les systèmes de contrôle en conséquence. D’autre part, pour les simulations, ils ont utilisé des puces IA spécialisées de NVIDIA. Cela permet, selon eux, de former les robots en moins d’un centième de temps par rapport aux puces à usages générales.

L’entraînement des algorithmes de contrôle des robots sur des obstacles virtuels ou une autre forme de simulation pourrait être utile pour différentes tâches. Allant du tri de colis à la couture de vêtement ou encore la récolte des cultures, cette technique ouvre plusieurs opportunités pour la recherche en robotique.
- Partager l'article :
Restez à la pointe de l'information avec
INTELLIGENCE-ARTIFICIELLE.COM !








