Le laboratoire de recherche sur l’IA de Facebook a développé un nouveau type de capteur en peau synthétique tactile pour les robots.
La détection tactile est un véritable défi de la recherche en robotique. En collaboration avec l’Université Carnegie Mellon, Facebook a annoncé ReSkin. Il s’agit d’une peau synthétique qui tire parti du machine learning et de la détection magnétique pour aider à calibrer le capteur.
ReSkin, la peau tactile de Facebook a créé pour les robots
Dans l’initiative de rendre les robots aussi intelligents et agiles que les humains, la détection tactile est un domaine de recherche émergent. Les chercheurs de Facebook travaillent sur des capteurs tactiles depuis des années, et en 2020 ils ont présenté Digit, destiné aux doigts robotique. Il dispose d’un corps en plastique et d’un boîtier pour une impression 3D et un moulage par injection.
Mais le nouveau capteur créé par Facebook AI est une peau synthétique à détection tactile pour les robots. Cette nouvelle technologie, appelée ReSkin, correspond à un élastomère déformable qui intègre des particules magnétiques.
Elle est basée sur un projet similaire du MIT appelé GelSight. Sous une surface de gel mou, un magnétomètre permet de détecter le déplacement des particules pour traduire leurs mouvements. La force des pressions cartographiée provoquera ensuite le mouvement du robot.
L’importance des capteurs tactiles
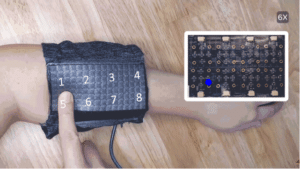
Abhinav Gupta et Tess Hellebrekers sont des chercheurs chez Facebook AI. Ils affirment que ReSkin peut être utilisé pour plus de 50 000 interactions. Cette peau tactile serait idéale pour les mains de robots, des gants tactiles, les manches de bras. Elle le serait même pour les chaussures pour chiens, selon eux.
Avec ReSkin, Facebook espère fournir une source de données de contact visant à faire progresser l’IA dans les tâches tactiles, notamment la classification d’objets. La peau tactile que les chercheurs de Facebook ont créée pour les robots peut fonctionner avec d’autres capteurs pour collecter d’autres types de données.
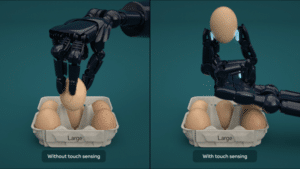
Ainsi, en combinant les informations visuelles, sonores et tactiles, les robots pourront à la fois identifier les objets et interagir avec eux. Par ailleurs, un bon sens du toucher requiert également de la délicatesse dans la manipulation des objets pour ne pas les écraser.
- Partager l'article :
Restez à la pointe de l'information avec
INTELLIGENCE-ARTIFICIELLE.COM !








