
La nouvelle boîte à outils de Nvidia aidera les développeurs à améliorer la prise en charge des robots d’IA dans ROS.
Le fabricant de puces IA a annoncé hier, lors de la conférence annuelle ROS World, le lancement d’Isaac ROS. Cette nouvelle boîte à outils de robotique destinée aux développeurs renforcera, selon Nvidia, leur perception de l’intelligence artificielle.
Nvidia annonce son package Isaac lors de la ROS World 2021
La ROS World est une conférence annuelle pour les professionnels ou les amateurs qui travaillent sur ROS (Robot Operating System). Il s’agit d’une plateforme open source pour le développement de logiciels robotique. Lors de l’événement, Nvidia a dévoilé sa boîte à outils intitulée Isaac ROS que l’entreprise présente comme un ensemble de technologies de « perception des performances ». En d’autres termes, les Isaac ROS GEM accélèrent le développement et améliorent les performances des produits. Ils permettront de simplifier l’intégration de la vision par ordinateur et des fonctionnalités IA/ML dans les applications robotiques basées sur ROS, lit-on sur le site de Nvidia.

Optimiser les performances
Les Isaac ROS GEM permettent donc aux développeurs de créer plus facilement des logiciels robotiques de pointe sur du matériel Nvidia. Tout d’abord, le package offre aux développeurs ROS une solution d’odométrie visuelle par caméra stéréo en temps réel. Cela permettra aux robots autonomes de se naviguer intelligemment dans leur environnement. Le GEM offre à la fois la précision et la vitesse grâce au GPU de Nvidia. En effet, le Jetson AGX Xavier permet désormais la localisation et cartographie simultanées (SLAM) en résolution HD (1280×720) et en temps réel.
D’autre part, la solution Isaac ROS comprend également un GEM pour l’inférence de deep learning. Le catalogue NGC de Nvidia fournit plusieurs modèles d’inférence. Mais les développeurs peuvent également exécuter leur propre modèle avec le package ROS2 DNN Inference GEM. En outre, ils peuvent affiner leur modèle à l’aide de l’ensemble d’outils TAO puis le déployer sur le serveur TensoRT ou Triton.
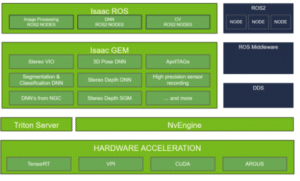
Le GEM d’inférence inclut un support U-Net qui permet de générer des masques de segmentation sémantique à partir d’images. Il comporte également un package DOPE qui peut être utilisé pour estimer la pose 3D des objets détectés.
- Partager l'article :

