Grâce au RGB-Stacking de DeepMind, les robots peuvent désormais empiler des objets de formes différentes.
À un certain niveau, la capacité des robots à manipuler des objets reste limitée par rapport à celle des humains. C’est par exemple le cas quand il est question d’interagir avec différents types d’objets à la fois. DeepMind propose alors le nouveau benchmark RGB-Stacking pour améliorer la capacité des robots à les empiler.
Les robots peuvent empiler différents objets grâce au RGB-Stacking
Généralement, quand nous devons empiler des objets de différentes formes, nous nous y prenons assez facilement. Mais en réalité, cela demande une série de compétences motrices, de perception et d’analyse. C’est ainsi que nous pouvons interagir avec différents types d’objets à la fois. Mais pour les robots, même les plus complexes, il s’agissait jusqu’ici d’un énorme défi.
L’équipe de DeepMind a présenté RGB-Stacking qu’elle propose comme nouveau point de référence pour apprendre aux robots à empiler des objets. Cette nouvelle approche consiste à leur apprendre à saisir des objets et à les placer en équilibre les uns sur les autres.
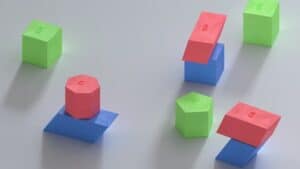
Certes, ce n’est pas la première recherche sur les tâches d’empilage robotique. Le RGB-Stacking diffère par la diversité des objets utilisés et les évaluations effectuées pour valider les résultats. En combinant la simulation et les données du monde réel, les robots peuvent alors apprendre à manipuler différents objets en même temps.
Acquérir des compétences généralisées
DeepMind propose sa solution en open source, incluant les objets RVB et des informations qui permettent de les imprimer en 3D. L’objectif avec le RGB-Stacking est d’entraîner des robots, et particulièrement un bras robotique, à empiler des objets de formes différentes à l’aide de l’apprentissage par renforcement. En d’autres termes, il demande aux robots d’apprendre en fonction des essais et des erreurs. Le robot s’améliore au fur et à mesure, en s’appuyant sur le retour d’information de ses actions.
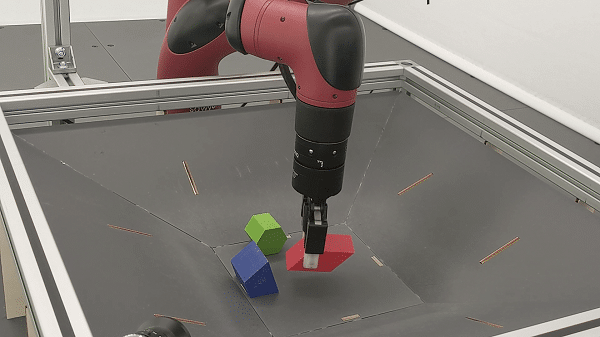
Dans la simulation, une pince est attachée au bras du robot au-dessus d’un panier qui comporte trois objets (rouge, vert et bleu). Le principe du jeu est d’empiler l’objet rouge sur le bleu en 20 secondes. L’objet vert correspond à un obstacle ou une distraction.
Selon les chercheurs, un robot entraîné à l’aide du RGB-Stacking acquerra sûrement des compétences généralisées. Par ailleurs, DeepMind propose deux versions de tâches avec des niveaux de difficulté différents : la « maîtrise des compétences » et la « généralisation des compétences ». En variant les qualités de saisie et d’empilage, il oblige le robot à adopter des comportements plus complexes.
- Partager l'article :
Restez à la pointe de l'information avec
INTELLIGENCE-ARTIFICIELLE.COM !








