
Le robot intelligence artificielle est une créature étonnante. Créée par l’Homme, elles est toutefois dotée d’une intelligence qui semble parfois avoisiner celle de l’être humain. Pour mieux comprendre cette technologie incroyable, il est toutefois nécessaire de comprendre comment fonctionnent les robots intelligence artificielle, de leur enveloppe physique jusqu’à l’ordinateur qui leur sert de cerveau.
Les êtres humains sont constitués de 5 composants basiques : une structure corporelle, un système musculaire permettant d’animer cette structure, un système sensoriel permettant de recevoir des informations sur ce corps et son environnement, une source d’énergie pour activer les muscles et les sens, et un système cérébral qui traite les informations sensorielles et indique aux muscles ce qu’ils doivent faire. Nous possédons aussi des attributs intangibles, comme l’intelligence et la moralité, mais les attributs énumérés ci-dessus sont les principaux composants physiques de l’être humain.
Un robot est constitué des mêmes composants. Un robot typique est un assemblage d’une structure physique, d’un moteur, d’un système sensoriel, d’une source d’alimentation et d’un ordinateur faisant office de cerveau pour contrôler ces différents éléments. Concrètement, les robots sont des versions créées par l’humain d’un animal. Ce sont des machines qui reproduisent le comportement d’un humain ou d’un animal.
L’un des pionniers de la robotique industrielle, Joseph Engelberger, a remarqué qu’il est impossible de définir les robots, mais qu’il est possible de savoir quand on en voit un. Si l’on passe en revue toutes les machines différentes que les Hommes considèrent comme des robots, il est en effet impossible de proposer une définition concrète.
Parmi les robots célèbres et ancrés dans la culture populaire, on peut citer R2D2 de Star Wars, le chien robot AIBO de Sony, le robot humanoïde ASIMO de Honda, les robots industriels sur les chaînes d’assemblage des usines, le robot Data de Star Trek, les BattleBots de Comedy Central, les robots bombardiers utilisés par l’armée, les rovers de la NASA, l’ordinateur HAL de l’Odyssée de l’Espace, les tondeuses autonomes Robomower, ou encore le kit robotique MindStorms de LEGO.
Toutes ces machines et ces intelligences artificielles sont considérées comme des robots et sont pourtant toutes différentes. Pour la plupart des roboticiens toutefois, la définition est plus précise : un robot possède un cerveau reprogrammable qui permet de déplacer un corps.
Si l’on opte pour cette définition, les robots se distinguent des autres machines mobiles comme les voitures par la présence d’un ordinateur. De nombreuses voitures récentes embarquent un ordinateur, mais cet ordinateur ne sert qu’à faire des ajustements mineurs. Les robots se distinguent également des ordinateurs ordinaires par leur nature physique. Robot et intelligence artificielle sont donc intimement liés.
La plupart des robots ont plusieurs caractéristiques en commun. Tout d’abord, tous les robots possèdent un corps amovible. Certains se contentent de roues motorisées, d’autres ont des douzaines de segments amovibles. Comme les os d’un corps humain, ces segments individuels sont connectés par des joints. Pour faire tourner leurs roues et pivoter leurs segments, les robots sont équipés d’un actuateur. Cet actuateur peut être un moteur électrique ou un solénoïde, ou encore un système hydraulique ou pneumatique.
Pour alimenter ces actuateurs, un robot a besoin d’une source d’énergie. La plupart des robots sont équipés d’une batterie, ou un câble permettant de le brancher à une prise murale. Les robots hydrauliques ont également besoin d’une pompe pour presser le fluide hydraulique, tandis que les robots pneumatiques nécessitent un compresseur d’air ou un réservoir d’air compressé.
Les actuateurs sont connectés à un circuit électrique. Ce circuit alimente les moteurs électriques et les solénoïdes. Il permet également d’activer le système hydraulique en manipulant les valves électriques. Les valves déterminent l’itinéraire du fluide pressurisé au sein de la machine. Par exemple, pour déplace une jambe hydraulique, le contrôleur du robot doit ouvrir la valve reliant la pompe à fluide au cylindre de piston attaché à la jambe. Le fluide pressurisé étend le piston et permet de déplacer la jambe vers l’avant. Typiquement, pour bouger leurs segments dans deux directions, les robots utilisent des pistons pouvant pousser de deux façons.
L’ordinateur du robot contrôle tout ce qui est attaché au circuit. Pour déplacer le robot, l’ordinateur active tous les moteurs et les valves nécessaires. La plupart des robots sont reprogrammables, ce qui signifie qu’il suffit d’écrire un nouveau programme informatique pour changer son comportement.
Tous les robots ont des systèmes sensoriels, et quelques-uns ont la faculté de voir, d’entendre, de sentir ou de goûter. Le sens le plus commun parmi les robots est celui du mouvement, à savoir la faculté du robot à surveiller ses propres mouvements. En règle générale, des roues sont attachées aux joints du robot. Une LED située sur l’un des côtés de la roue émet un rayon de lumière à travers les emplacements vers un capteur de luminosité situé de l’autre côté de la roue. Quand un robot bouge un joint spécifique, la roue tourne. Les slots interrompent le rayon de lumière lorsque la roue tourne, et les capteurs de luminosité lisent les patterns des clignotements de lumière et transmettent les données à l’ordinateur. L’ordinateur peut ainsi déterminer avec précision l’ampleur des déplacements des joints en se basant sur cette pattern. Il s’agit du même système que celui utilisé par les souris d’ordinateur. Telles sont les bases du fonctionnement robotique. Les roboticiens peuvent combiner ces éléments de façon illimitée pour créer des robots plus complexes.
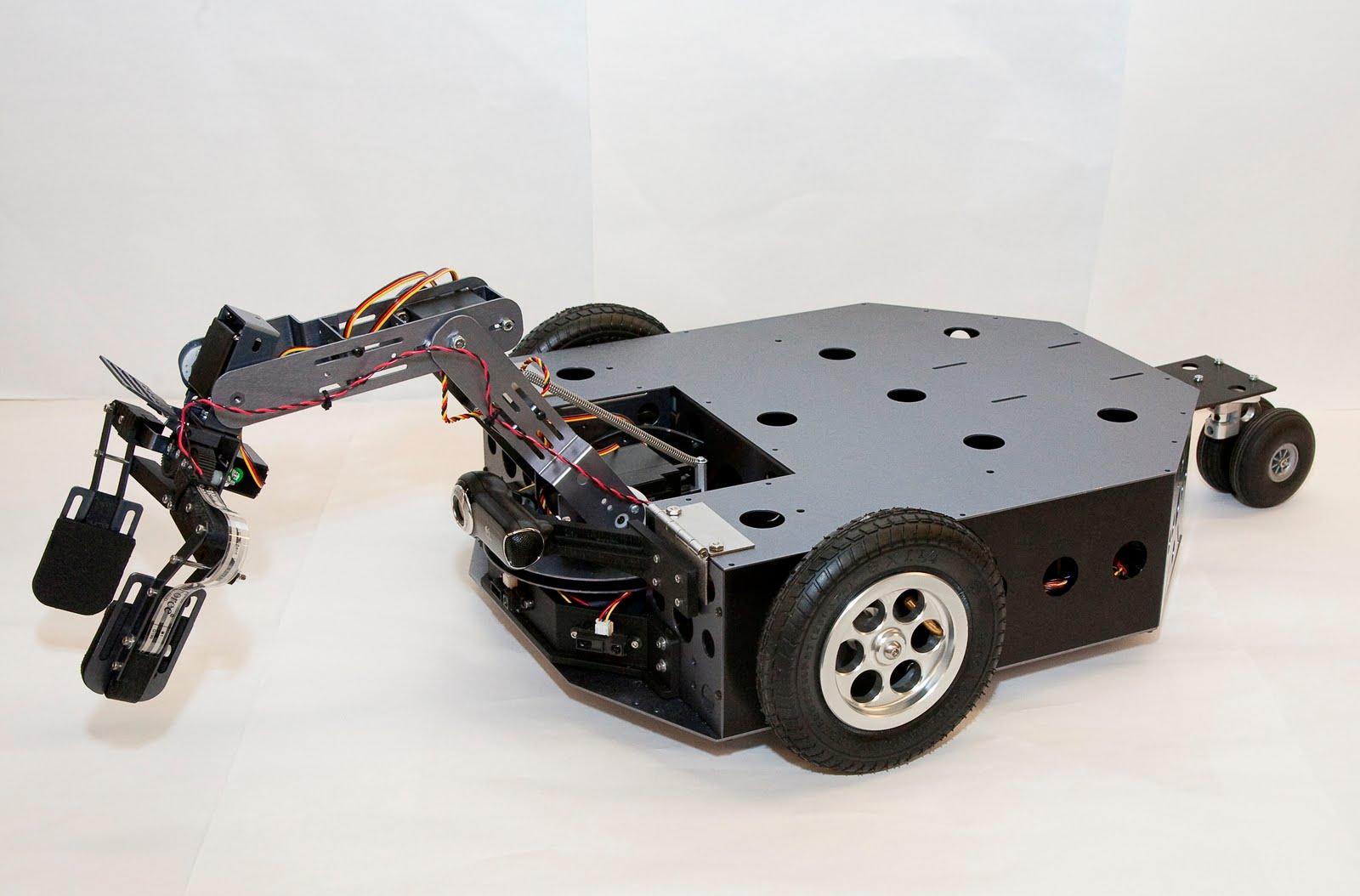
Le bras robotique

Le terme robot vient du mot tchèque robota, généralement traduit par « travail forcé ». En effet, ce terme résume bien le destin d’une majorité de robots. La plupart des machines de ce monde sont conçues pour effectuer des tâches répétitives et pénibles ou dangereuses pour l’être humain.
Le robot de fabrication le plus commun est le bras robotique. Un bras robotique typique est composé de sept segments de métal, connectés par six joints. L’ordinateur contrôle le robot avec précision par une rotation des moteurs connectés à chaque joint, et le bras répète les mêmes mouvements encore et encore. Des capteurs de mouvements lui permettent de s’assurer qu’il ne bouge pas trop.
Un robot industriel avec six joints ressemble beaucoup à un bras humain. Il possède l’équivalent d’une épaule, d’un coude et d’un poignet. Typiquement, le bras est connecté à une structure de base stationnaire plutôt qu’à un corps amovible. Ce type de robot a six degrés de liberté, ce qui signifie qu’il peut pivoter de six façons différentes. En comparaison, un bras humain possède sept degrés de liberté.
Le rôle du bras est de bouger la main d’un endroit à l’autre. De façon similaire, le rôle du bras robotique est de déplacer un effecteur d’un endroit à l’autre. Il est possible d’équiper un bras robotique de toutes sortes d’effecteurs, conçus pour un usage spécifique. Un effecteur couramment utilisé s’apparente à une version simplifiée de la main humaine, capable de saisir et de porter différents objets. Les mains robotiques ont souvent des capteurs de pression qui indiquent à l’ordinateur la force exercée par le robot. Parmi les autres effecteurs, on dénombre les sprays de peinture, les chalumeaux, ou les perceuses.
Les robots industriels sont conçus pour répéter la même tâche encore et encore au sein d’un environnement contrôlé. Pour apprendre à un robot à faire son travail, le programmeur guide le bras à l’aide d’un contrôleur. Le robot mémorise la séquence exacte de mouvements de mouvements et la répète à l’infini.
La plupart des robots industriels travaillent sur des chaînes d’assemblage, et assemblent des voitures. Les robots peuvent effectuer ce travail plus efficacement que les humains grâce à leur précision. Ils peuvent percer systématiquement au même endroit, et conservent toujours la même force, peu importe le nombre d’heures pendant lesquelles ils travaillent, contrairement aux êtres humains qui se fatiguent. Les robots de fabrication sont également très importants dans l’histoire de l’informatique, car il faut une précision extrême pour assembler des microprocesseurs.
Robots mobiles
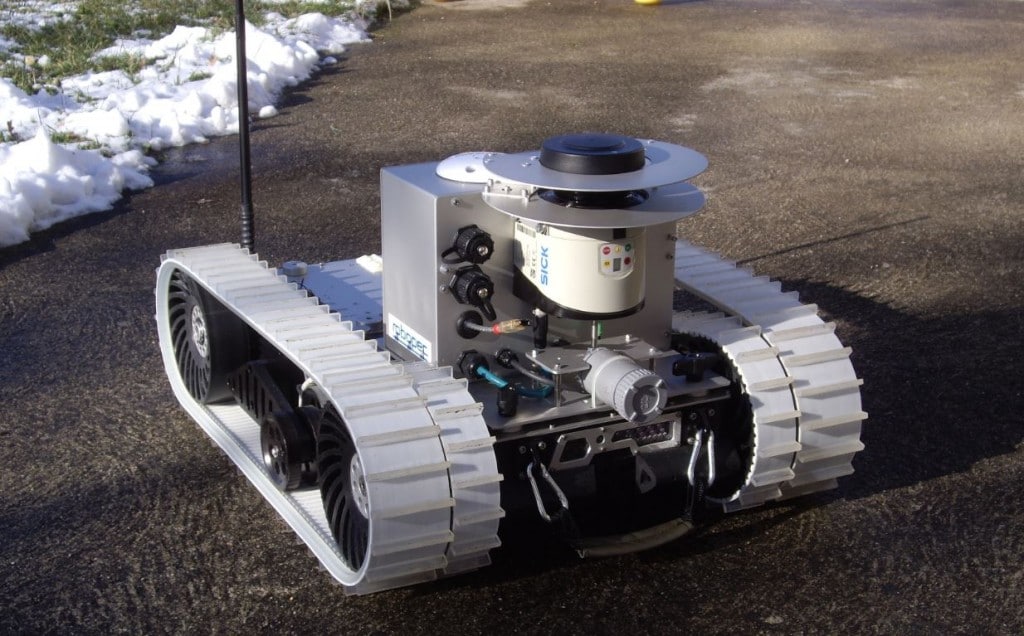
Les bras robotiques sont relativement faciles à construire et à programmer, car ils n’opèrent qu’au sein d’un périmètre réduit. Un robot doté de mobilité s’avère nettement plus complexe. Il faut tout d’abord développer un système de locomotion. Si le robot doit se déplacer sur un sol plat, les roues ou les pneus sont généralement la meilleure option. Toutefois, de nombreux roboticiens optent pour des jambes, plus adaptables et plus proches du système de locomotion humain.
Généralement, les pistons hydrauliques ou pneumatiques permettent de déplacer les jambes des robots vers l’avant et l’arrière. Les pistons sont attachés aux différents segments des jambes comme les muscles sont attachés aux différents os du corps humain. Tout comme le cerveau d’un bébé doit comprendre quelle combinaison de muscles lui permet de marcher sans tomber, le roboticien doit déterminer la combinaison de mouvements de pistons permettant la marche, et la programmer dans l’ordinateur du robot. De nombreux robots mobiles ont un système d’équilibre intégré, indiquant à l’ordinateur quand il est nécessaire de corriger ses mouvements.
La locomotion bipède est instable par essence, ce qui la rend très difficile à implémenter à des robots. Pour créer des robots marcheurs plus stables, les designers s’inspirent généralement du monde animal, et plus particulièrement des insectes. Les insectes à six pattes sont très équilibrés, et s’adaptent bien à une large variété de terrains.
Certains robots mobiles sont contrôlés à l’aide d’une télécommande. Un humain leur indique ce qu’ils doivent faire et quand et à quel moment ils doivent le faire. La télécommande peut communiquer avec le robot par le biais d’un fil, ou à l’aide de signaux radio ou infrarouge. Les robots télécommandés sont très utiles pour explorer des environnements dangereux ou inaccessibles comme les profondeurs sous-marines ou l’intérieur d’un volcan.
Robots autonomes
Les robots autonomes peuvent agir indépendamment. Ils sont programmés pour répondre d’une certaine façon à un stimuli extérieur. On peut prendre l’exemple d’un robot doté d’un capteur d’obstacles. Une fois activé, ce robot suit une ligne droite. Lorsqu’il percute un obstacle, l’impact active son capteur. Son programme lui indique de retourner en arrière, de tourner à droite et de continuer à avancer à nouveau. Ainsi, le robot change de direction chaque fois qu’il rencontre un obstacle.
Le robots avancés reposent sur des versions plus élaborées de cette idée. Les roboticiens créent de nouveaux programmes et de nouveaux systèmes de capteurs plus intelligents et plus élaborés. Aujourd’hui, les robots peuvent efficacement naviguer dans une large variété d’environnements.
Les robots mobiles les plus simples utilisent des capteurs infrarouges et des capteurs à ultrasons pour détecter les obstacles. Ces capteurs fonctionnent de la même façon que l’écholocalisation des animaux. Le robot envoie un signal sonore ou un rayon de lumière infrarouge et détecte la réflexion du signal. Il mesure la distance des obstacles en se basant sur le temps que prend le signal à revenir.
Les robots les plus avancés utilisent la vision stéréo pour visualiser le monde autour d’eux. Deux caméras offrent à ces robots une perception des profondeurs, et un logiciel de reconnaissance d’image leur donne la faculté de localiser et de classifier divers objets. Les robots peuvent aussi utiliser des microphones et des capteurs d’odeurs pour analyser le monde autour d’eux.
Certains robots autonomes ne peuvent fonctionner qu’au sein d’un environnement familier. Les robots tondeuses, par exemple, dépendent de bordures bien délimitées qui définissent les limites du jardin. Les robots les plus avancés peuvent toutefois analyser des environnements inconnus et s’y adapter, même dans les zones les plus sinueuses.
Ces robots peuvent associer certaines patterns de terrain à certaines actions. Par exemple, un rover peut élaborer une carte du terrain qui lui fait face en se basant sur ses capteurs visuels. Si la carte montre des patterns vallonnées, le robot sait comment se déplacer d’une certaine manière. Ce type de système est très utile pour les robots explorateurs chargés de découvrir d’autres planètes. Un design alternatif consiste à s’en remettre à l’aléatoire. Quand un robot se retrouve coincé, il bouge son corps de toutes les façons possibles jusqu’à ce que l’une d’entre elles fonctionne.
Robot intelligence artificielle
L’intelligence artificielle est probablement le champ le plus excitant de la robotique, mais également le plus controversé. Le débat fait rage pour déterminer si les robots doivent être dotés d’intelligence. Tout comme la notion de robot, l’intelligence est difficile à définir. L’intelligence artificielle ultime serait la recréation du processus de pensée humaine. Une machine créée par l’humain, dotée de capacités intellectuelles égales ou supérieures.
Une telle intelligence inclurait notamment la capacité à apprendre, à raisonner, à utiliser le langage et à formuler des idées originales. Les roboticiens sont encore loin de parvenir à atteindre un tel niveau d’intelligence, mais ont effectué de nombreux progrès dans ce domaine. Aujourd’hui, un robot intelligence artificielle peut répliquer certains éléments spécifiques de nos facultés intellectuelles.
Les ordinateurs peuvent résoudre des problèmes dans certains domaines. L’idée basique de la résolution de problème par un robot intelligence artificielle est très simple, mais son exécution est compliquée. Tout d’abord, le robot intelligence artificielle ou l’ordinateur rassemble des faits sur une situation au travers de capteurs ou par des entrées humaines. L’ordinateur compare cette information à des données stockées et détermine ce que ces informations signifient. Ils lancent ensuite une variété d’actions possibles et prédisent quelles actions pourront permettre de résoudre le problème. Bien sûr, l’ordinateur peut uniquement résoudre les problèmes qu’il est programmé pour résoudre. Il n’a pas de capacités analytiques généralisées.
Certains robots possèdent toutefois la capacité d’apprendre, dans une certaine mesure. Ces robots reconnaissent si une certaine action permet d’atteindre un résultat souhaité. Le robot intelligence artificielle stocke ensuite cette information et tente cette action à succès la prochaine fois qu’il rencontre la même situation. Là encore, les ordinateurs modernes ne peuvent effectuer ces tâches que des situations limitées. Ils ne peuvent pas absorber des informations comme un humain. Certains robots peuvent apprendre en imitant les actions humaines. Par exemple, au Japon, des roboticiens ont appris à un robot intelligence artificielle comment danser en lui faisant une démonstration de mouvements.
Certains robots peuvent interagir socialement. Par exemple, Kismet, un robot intelligence artificielle du MIT, reconnaît le langage corporel humain et l’intonation vocale et réagit en fonction. Les créateurs de Kismet sont intéressés dans la façon dont les humains et les bébés interagissent, en se basant uniquement sur le ton de la voix et l’expression du regard. Ces interactions pourraient être la base d’un système d’apprentissage similaire à celui de l’humain.

Kismet et les autres robots humanoïdes du MIT AI Lab opèrent en utilisant une structure de contrôle non conventionnelle. Plutôt que d’effectuer chaque action en utilisant un ordinateur central, les robots contrôlent des actions d’un niveau inférieur à l’aide d’ordinateurs de niveau inférieur. Le directeur du programme, Rodney Brooks, pense qu’il s’agit d’un modèle plus semblable à l’intelligence humaine. Nous effectuons la plupart des tâches automatiquement, sans décider de les faire consciemment.
Le véritable défi de l’intelligence artificielle est de comprendre comment fonctionne l’intelligence naturelle. Développer un robot intelligence artificielle n’est pas la même chose que de fabriquer un cœur artificiel. Les scientifiques ne disposent pas d’un modèle simple et concret à imiter. Le cerveau contient des milliards de neurones, et nous pensons en établissant des connexions électriques entre ces différents neurones. Toutefois, nous ne savons pas exactement comment ces connexions mènent à des raisonnements supérieurs ou des opérations d’un niveau inférieur. Ce système ne semble pas compréhensible.
Pour cette raison, la recherche en intelligence artificielle est principalement théorique. Les scientifiques émettent des hypothèses sur la façon dont nous apprenons et pensons et la raison pour laquelle nous le faisons. Ils expérimentent ensuite avec ces idées en utilisant le robot intelligence artificielle. Brooks et son équipe se focalisent sur les robots humanoïdes cas ils sentent que la possibilité d’expérimenter le monde comme un humain est essentiel pour développer une intelligence humaine. Ces robots permettent également des interactions plus faciles et rendent donc l’apprentissage plus facile pour le robot intelligence artificielle.
Tout comme la robotique physique est un outil utile pour comprendre l’anatomie humaine et animale, la recherche en intelligence artificielle est utile pour comprendre comment fonctionne l’intelligence naturelle. Pour certains roboticiens, il s’agit du but ultime du design de robots. D’autres visualisent un monde dans lequel nous côtoyons le robot intelligence artificielle et utilisons une variété de robots inférieurs pour le travail manuel, les soins de santé et la communication. Un grand nombre d’experts prédisent que l’évolution de la robotique nous transformera en cyborgs, à savoir des humains combinés avec des machines.
Dans tous les cas, le robot intelligence artificielle occupera une place importante dans nos vies quotidiennes dans le futur. Dans les décennies à venir, les robots vont progressivement passer du monde industriel et scientifique à la vie de tous les jours, de la même façon que les ordinateurs ont investi les foyers dans les années 80.
- Partager l'article :

