Cette nouvelle étude combine l’utilisation du LiDAR et la vision par ordinateur pour transformer les nuages de points en images photoréalistes à l’aide des GAN.
Des chercheurs israéliens ont développé une nouvelle approche qui consiste à générer des images photoréalistes à partir des nuages de points LiDAR. L’étude répond au défi de l’identification des voitures noires en cas de manque d’informations.
Utiliser les GAN pour générer des images photoréalistes à partir des nuages de points LiDAR
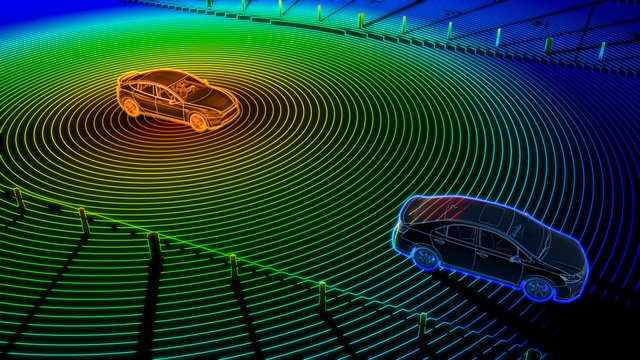
Pour un LiDAR, la détection d’une voiture noire en vision de nuit peut être difficile. Les LiDAR se basent sur la réflectivité des objets pour générer des nuages de points. Il n’est donc pas étonnant que les voitures noires soient plus difficilement identifiables par ces capteurs. Et cela peut même être le cas pour les autres techniques de vision par ordinateur.
Cette semaine en Israël, une équipe de chercheurs ont publié une nouvelle étude qui consiste à combiner ces deux domaines. Autrement dit, ils proposent de convertir les nuages de points LiDAR en images photoréalistes à l’aide d’un GAN (réseau antagoniste génératif).

Le déroulement de l’étude
Dans le cadre de l’étude, ils ont entraîné les GAN sur une paire de données, à savoir des nuages de points et des images prises par une caméra. Pour tester leur méthode, les chercheurs ont d’abord entraîné l’algorithme sur des données LiDAR relatives à la réflectivité. Ensuite, ils ont ajouté des nuages de points comportant à la fois des informations sur la réflectivité et sur la distance.
Lors du premier test, ils ont conclu que l’algorithme générait des images uniquement à partir d’informations contextuelles. Quant à la deuxième expérience, elle a abouti à des résultats plus cohérents aussi obtenus en grande partie en se basant sur le contexte. Certes, les résultats des images générées par les GAN ne sont pas de très bonne qualité. Néanmoins, ils suggèrent que la représentation est en grande partie similaire à la vérité du terrain.
D’après les chercheurs, l’incohérence de certaines informations résulte du fait que la prédiction des voitures noires se base principalement sur les informations contextuelles et non sur la réflectivité. Ils proposent donc de combiner le système LiDAR à un autre système basé sur les GAN. Cela permettrait, selon eux, d’améliorer la reconnaissance visuelle des objets en temps réel.
- Partager l'article :

